- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Một bài viết để hiểu sự khác biệt giữa động cơ bước và động cơ servo và động cơ servo
I. Sự khác biệt giữa động cơ bước và động cơ servo và động cơ servo
Động cơ bước: là tín hiệu xung điện thành chuyển vị góc hoặc chuyển vị đường thẳng của bộ phận điều khiển vòng hở của bộ phận động cơ bước. Nói một cách đơn giản, nó dựa vào tín hiệu xung điện để điều khiển góc và số vòng quay. Vì vậy anh chỉ dựa vào tín hiệu xung để xác định tốc độ quay là bao nhiêu. Vì không có cảm biến nên góc dừng có thể bị lệch. Tuy nhiên, tín hiệu xung chính xác sẽ giảm thiểu độ lệch.
Động cơ servo: dựa vào mạch điều khiển servo để điều khiển tốc độ của động cơ, thông qua cảm biến để điều khiển vị trí quay. Vì vậy việc điều khiển vị trí rất chính xác. Và tốc độ quay cũng có thể thay đổi.
servo (Servo điện tử): Thành phần chính của servo là mô tơ servo. Nó chứa mạch điều khiển động cơ servo + bộ giảm tốc. Ồ vâng, mô tơ servo không có bộ giảm tốc. Và servo có bộ giảm tốc.
Trong trường hợp servo giới hạn, nó dựa vào chiết áp dưới trục đầu ra để xác định góc lái của tay lái. Điều khiển tín hiệu servo là tín hiệu được điều chế độ rộng xung (PWM), trong đó bộ vi điều khiển có thể dễ dàng tạo ra tín hiệu này.
II. Nguyên lý cơ bản của động cơ bước
Nó hoạt động như thế nào:
Thông thường rôto của động cơ là một nam châm vĩnh cửu và khi dòng điện chạy qua cuộn dây stato, cuộn dây stato sẽ tạo ra một từ trường vectơ. Từ trường này sẽ làm cho rôto quay một góc sao cho chiều của cặp từ trường của rôto sẽ trùng với chiều của từ trường của stato. Khi vectơ từ trường của stato quay một góc. Rôto cũng quay một góc với từ trường này. Đối với mỗi xung điện đầu vào, động cơ sẽ quay một bước về phía trước. Độ dịch chuyển góc đầu ra của nó tỷ lệ thuận với số xung đầu vào và tốc độ quay của nó tỷ lệ thuận với tần số của xung. Bằng cách thay đổi thứ tự cấp điện của cuộn dây, động cơ sẽ đảo chiều. Do đó, số lượng, tần số xung và thứ tự cấp điện cho các cuộn dây của từng pha động cơ có thể được điều khiển để điều khiển chuyển động quay của động cơ bước.
Nguyên lý sinh nhiệt:
Thường thấy các loại động cơ, bên trong là lõi sắt và cuộn dây quấn. Điện trở cuộn dây, công suất sẽ tạo ra tổn thất, tổn thất kích thước và điện trở và dòng điện tỷ lệ với bình phương, thường được gọi là tổn thất đồng, nếu dòng điện không phải là sóng DC hoặc hình sin tiêu chuẩn, cũng sẽ tạo ra tổn thất hài hòa; Lõi có tác dụng dòng điện xoáy trễ, trong từ trường xoay chiều cũng sẽ tạo ra tổn thất, kích thước của vật liệu, dòng điện, tần số, điện áp liên quan, gọi là tổn thất sắt. Tổn thất đồng, hao hụt sắt sẽ biểu hiện dưới dạng sinh nhiệt, ảnh hưởng đến hiệu suất của động cơ. Động cơ bước thường theo đuổi độ chính xác định vị và công suất mô-men xoắn, hiệu suất tương đối thấp, dòng điện thường lớn hơn và các thành phần hài cao, tần số dòng điện xen kẽ với tốc độ và sự thay đổi, vì vậy động cơ bước thường có tình trạng nhiệt và tình trạng nghiêm trọng hơn so với động cơ xoay chiều thông thường.
III. Cấu tạo bánh lái
servo chủ yếu bao gồm vỏ, bảng mạch, động cơ truyền động, bộ giảm tốc và bộ phận phát hiện vị trí. Nguyên lý làm việc của nó là bộ thu gửi tín hiệu đến servo và IC trên bảng mạch điều khiển động cơ corless bắt đầu quay, và năng lượng được truyền đến cánh tay đòn thông qua hộp số giảm tốc, đồng thời, bộ dò vị trí sẽ gửi tín hiệu trở lại để xác định xem nó đã đến vị trí hay chưa. Máy dò vị trí thực sự là một điện trở thay đổi. Khi servo quay, giá trị điện trở sẽ thay đổi tương ứng và có thể biết được góc quay bằng cách phát hiện giá trị điện trở. Động cơ servo thông thường là một sợi dây đồng mỏng quấn quanh một rôto ba cực, khi dòng điện chạy qua cuộn dây sẽ tạo ra một từ trường, và ngoại vi của nam châm rôto sẽ tạo ra lực đẩy, từ đó tạo ra lực quay. Theo vật lý, mômen quán tính của một vật tỉ lệ thuận với khối lượng của nó, do đó khối lượng của vật cần quay càng lớn thì lực cần thiết càng lớn. Để đạt được tốc độ quay nhanh và tiêu thụ điện năng thấp, servo được làm bằng các dây đồng mỏng xoắn thành một hình trụ rỗng rất mỏng, tạo thành một rôto rỗng rất nhẹ không có cực và nam châm được đặt bên trong hình trụ, đó là động cơ cốc rỗng.
Để phù hợp với các môi trường làm việc khác nhau, có các loại servo có thiết kế chống thấm nước và chống bụi; và để đáp ứng các yêu cầu tải khác nhau, có các bánh răng bằng nhựa và kim loại dành cho động cơ servo, còn bánh răng kim loại dành cho động cơ servo thường có mô-men xoắn cao và tốc độ cao, với ưu điểm là bánh răng sẽ không bị sứt mẻ do tải quá mức. Các servo cấp cao hơn sẽ được trang bị ổ bi giúp quay nhanh và chính xác hơn. Có sự khác biệt giữa một vòng bi và hai vòng bi, tất nhiên hai vòng bi tốt hơn. Các servo FET mới chủ yếu sử dụng FET (Transistor hiệu ứng trường), có ưu điểm là điện trở trong thấp và do đó tổn thất dòng điện ít hơn so với các bóng bán dẫn thông thường.
IV. Nguyên lý hoạt động của servo
Từ sóng pwm vào mạch bên trong để tạo ra điện áp phân cực, bộ tạo công tắc tơ thông qua bộ giảm tốc để điều khiển chiết áp chuyển động, sao cho khi chênh lệch điện áp bằng 0, động cơ dừng lại, để đạt được hiệu ứng servo.
Các giao thức dành cho servo servo đều giống nhau, nhưng các servo mới nhất xuất hiện có thể khác.
Giao thức nói chung là: độ rộng mức cao trong 0,5ms ~ 2,5ms để điều khiển servo quay qua các góc khác nhau.
V. Động cơ servo hoạt động như thế nào
Hình bên dưới minh họa mạch điều khiển động cơ servo được chế tạo bằng bộ khuếch đại hoạt động công suất LM675 và động cơ là động cơ servo DC. Như có thể thấy trong hình, bộ khuếch đại hoạt động nguồn LM675 được cung cấp bởi 15V và điện áp 15V được thêm vào đầu vào cùng pha của bộ khuếch đại hoạt động LM675 thông qua RP 1 và điện áp đầu ra của LM675 được thêm vào đầu vào của mô tơ servo. Động cơ được trang bị bộ tạo tín hiệu đo tốc độ để phát hiện tốc độ động cơ theo thời gian thực. Trên thực tế, bộ tạo tín hiệu tốc độ là một loại máy phát và điện áp đầu ra của nó tỷ lệ thuận với tốc độ quay. Điện áp đầu ra từ bộ tạo tín hiệu đo tốc độ G được đưa trở lại đầu vào đảo ngược của bộ khuếch đại thuật toán dưới dạng tín hiệu lỗi tốc độ sau mạch chia điện áp. Giá trị điện áp do chiết áp lệnh tốc độ RP1 thiết lập được thêm vào đầu vào cùng pha của bộ khuếch đại thuật toán sau khi phân chia điện áp cho R1.R2, tương đương với điện áp tham chiếu.
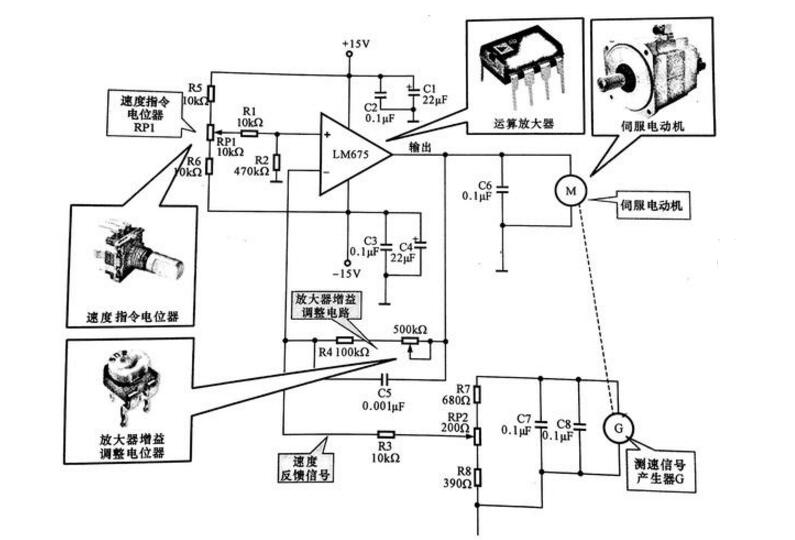
Sơ đồ điều khiển động cơ servo
Động cơ servo: Ký hiệu bằng chữ M dành cho động cơ servo, nó là nguồn cung cấp năng lượng cho hệ thống truyền động. Bộ khuếch đại hoạt động: được biểu thị bằng tên mạch, tức là LM675, là một bộ phận khuếch đại trong mạch điều khiển servo cung cấp dòng điện truyền động cho động cơ servo.
Chiết áp lệnh tốc độ RP1: Đặt điện áp tham chiếu của bộ khuếch đại hoạt động trong mạch, tức là cài đặt tốc độ. Chiết áp điều chỉnh độ lợi của bộ khuếch đại RP2: Được sử dụng trong mạch để tinh chỉnh độ lợi của bộ khuếch đại và kích thước của tín hiệu phản hồi tốc độ tương ứng.
Khi tải của động cơ thay đổi, điện áp đưa trở lại đầu vào đảo ngược của bộ khuếch đại hoạt động cũng thay đổi, tức là khi tải của động cơ tăng, tốc độ giảm và điện áp đầu ra của bộ tạo tín hiệu tốc độ cũng giảm, do đó điện áp ở đầu vào đảo ngược của bộ khuếch đại thuật toán giảm và chênh lệch giữa điện áp này và điện áp tham chiếu tăng và điện áp đầu ra của bộ khuếch đại hoạt động tăng. Ngược lại, khi tải trở nên nhỏ hơn và tốc độ động cơ tăng, điện áp đầu ra của bộ tạo tín hiệu đo tốc độ tăng lên, điện áp phản hồi được thêm vào đầu vào đảo ngược của bộ khuếch đại hoạt động tăng lên, sự khác biệt giữa điện áp này và điện áp tham chiếu giảm, điện áp đầu ra của bộ khuếch đại hoạt động giảm và tốc độ động cơ giảm theo, do đó tốc độ quay có thể tự động ổn định ở giá trị cài đặt.